



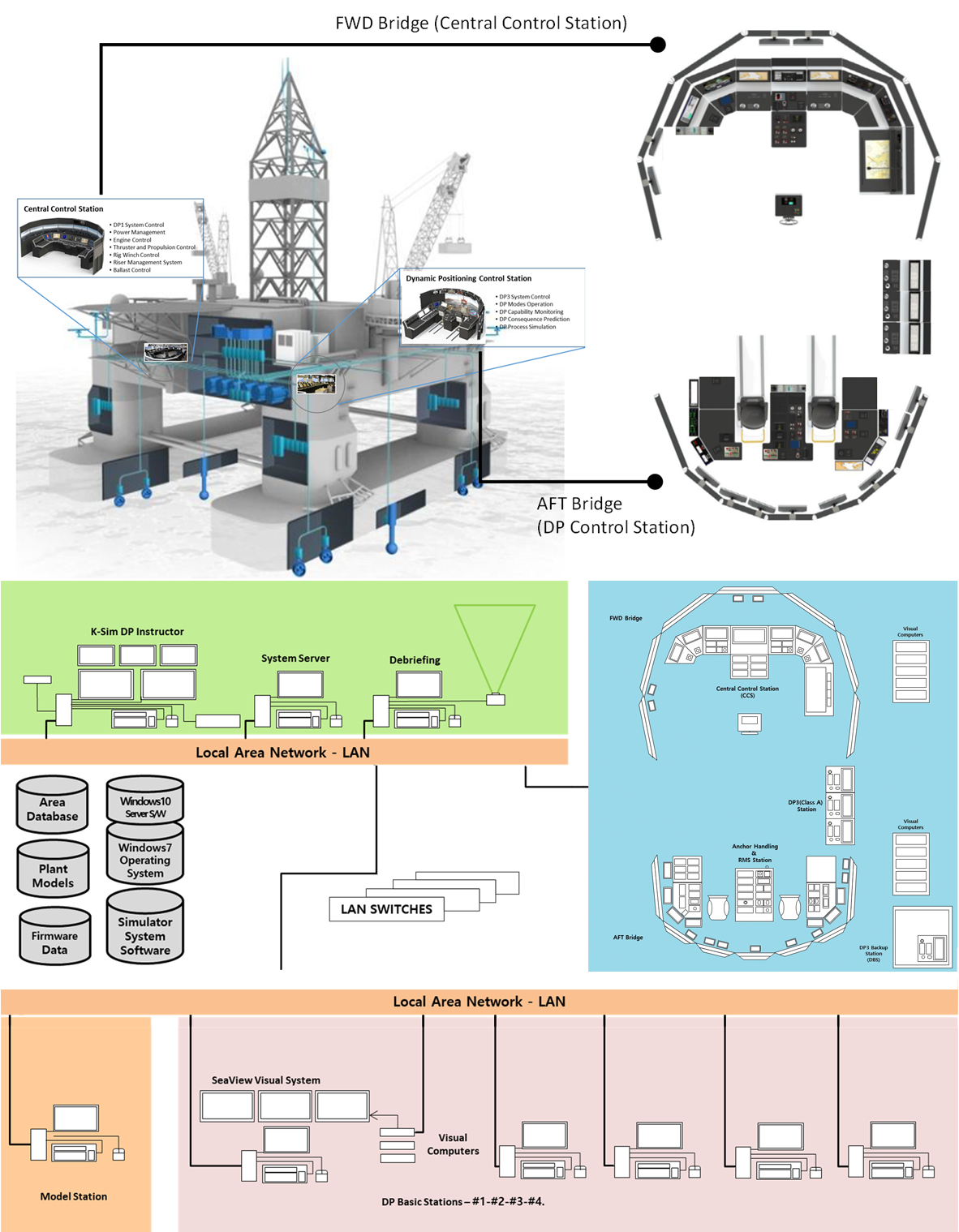
DP3 Engineering Simulation System
DP3 Class Engineering Simulation System
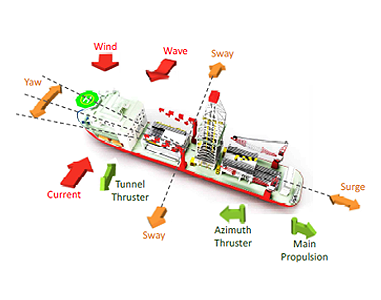
Ships and offshore units in the ocean environment are affected by wind, wave and forces by propulsion system. Position, heading and velocity of units are changed from moment to moment by loads. In order to meet the designed positioning capability, DP controller inputs are forces in surge, sway and moment in yaw.
Features of Simulation System
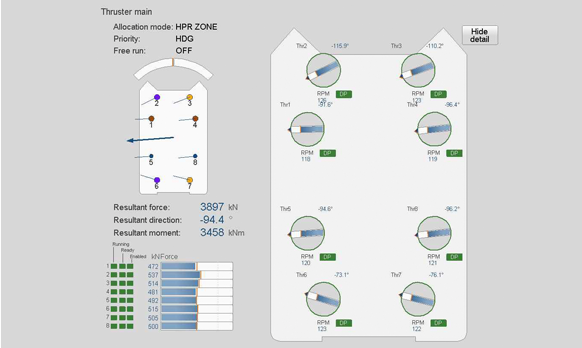
Thruster Allocation
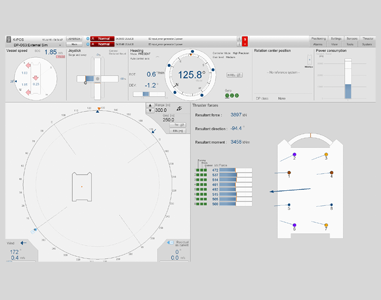
DP system’s controller continuously calculates the actual force requirements in the alongships and athwartships directions (the force setpoint), and the required rotational moment (the turning moment setpoint).
The Thruster Allocation distributes these setpoints as pitch/rpm/force/load and azimuth control signals to each thruster/propeller, thus obtaining the force and moment required for the position and heading control.
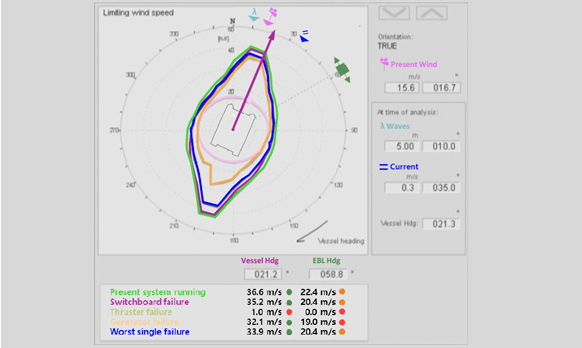
DP Capability analysis
DP capability defines a DP vessel’s station-keeping ability under given environmental and operational conditions.
Exactly balanced by the maximum available thrust offered by the thruster configuration.
Presented by means of a thrust utilization envelope instead of a limiting wind speed envelope
Means of a limiting mean wind speed for a discrete number of wind angles of attack
Presented by means of a thrust utilization envelope instead of a limiting wind speed envelope
Means of a limiting mean wind speed for a discrete number of wind angles of attack
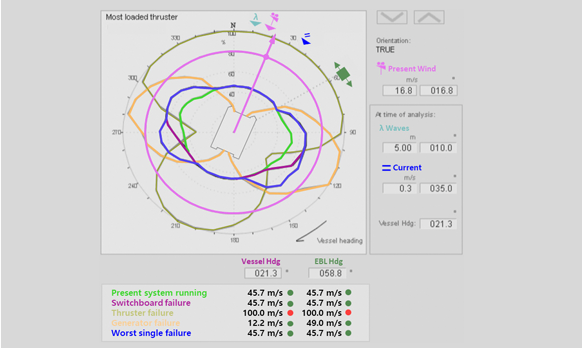
Consequence Analysis
Consequence analysis verifies that the vessel will remain in position even if the worst case failure occurs.
Verify the thrusters remaining in operation
Lead to a loss of position due to insufficient thrust for the prevailing environmental conditions
Simulates the thrust and power remaining after the worse case failure, based on manual input of weather trend
Lead to a loss of position due to insufficient thrust for the prevailing environmental conditions
Simulates the thrust and power remaining after the worse case failure, based on manual input of weather trend
DP Operational Modes
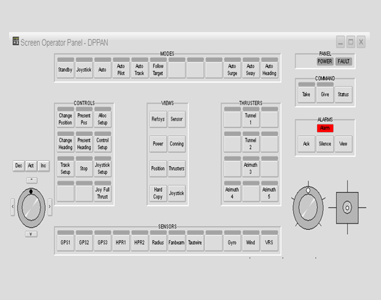
Auto Heading Mode
In the Auto Heading mode, the system accurately controls the heading:
Present Heading, which maintains the vessel's current heading
Change Heading, which rotates the vessel to the specified heading applying specified rate of turn
Minimum Power Heading, which continuously optimizes the vessel's heading for the lowest power consumption
Change Heading, which rotates the vessel to the specified heading applying specified rate of turn
Minimum Power Heading, which continuously optimizes the vessel's heading for the lowest power consumption
Auto Position mode
In the Auto Position mode, the system automatically controls the heading and position of the vessel
Present Position, which maintains the present vessel position
Change Position, which moves the vessel to a new position with requested speed and acceleration
Change Position, which moves the vessel to a new position with requested speed and acceleration
Joystick mode
In the Joystick mode, the operator controls the vessel using the three-axis
joystick. Joystick operation can be combined with automatic heading control
or with partial position control to ease e.g. docking. It can also incorporate
automatic wind compensation to allow increased operational focus on
ship handling.
Follow Target Mode
Dynamic Positioning system can command the vessel to follow an ROV during
e.g. pipe inspection using hydro acoustic measurements from mobile
transponder mounted on the ROV.
Autopilot mode
Wheel-marked Autopilot can be integrated in the DP system. Speed can be
controlled by propulsion levers or system joystick.
Application of Simulation System to Offshore Projects


Project : FEED Design Project
Objectives
Installation of 1,000ton Module of Semi-submersible Platform
Main Usage
Basic Design of Bumper and Guide
Verification of Main Equipment Arrangement
Simulation Test of Dynamic Positioning
Verification of Main Equipment Arrangement
Simulation Test of Dynamic Positioning
Project : Sleipnir Project
Objectives
Operation and Maintenance of Offshore Crane
Main Usage
Development of Ballast, Crane, DP System
Study on Operational Technology
Simulation for Verification of Operation and Maintenance Process
Study on Operational Technology
Simulation for Verification of Operation and Maintenance Process